最简单的FEM实现弹性
我们以最简短的方式总结下GAMES103里面linear FEM计算弹性的方法
slides:
https://games-cn.org/games103-slides/
太长不看版
[f1f2]=−ArefFS[X10X20]−T F=[x10x20][X10X20]−1 S=2μG+λtrace(C)I
G=21(FTF−I) 细节版本
以下均为二维情况(二维网格为三角形,三维是四面体)
我们从结果倒推
- 我们要最终得到:施加到每个网格上的力
 其中 Aref是reference state的三角形面积。F是deformation gradient, S是second piola-kirchoff stress。
其中 Aref是reference state的三角形面积。F是deformation gradient, S是second piola-kirchoff stress。
[f1f2]=−ArefFS[X10X20]−T - F如何计算?
根据F的物理含义,它就是从reference state到current state的一个变换矩阵而已。因此我们可以先将点转化为距离(例如全部减去点0的坐标,其实就是rest length),然后根据下面的公式:current lenght 矩阵 乘以 rest len矩阵的逆 即可。
F=[x10x20][X10X20]−1 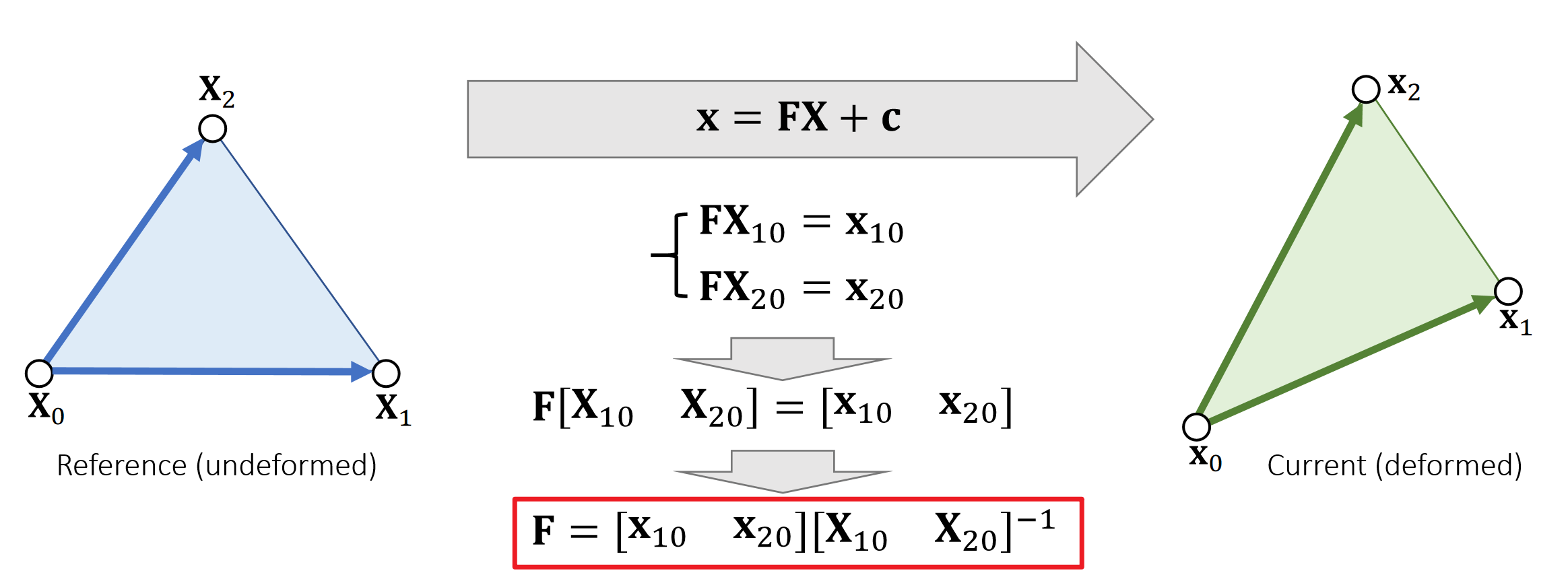 3. S如何计算?
3. S如何计算?
使用StVK模型,得到应力与应变的关系。
注:我们的公式和物理量是拉格朗日视角下的,或者说叫以reference state作为参考坐标系的。
S=2μG+λtrace(C)I 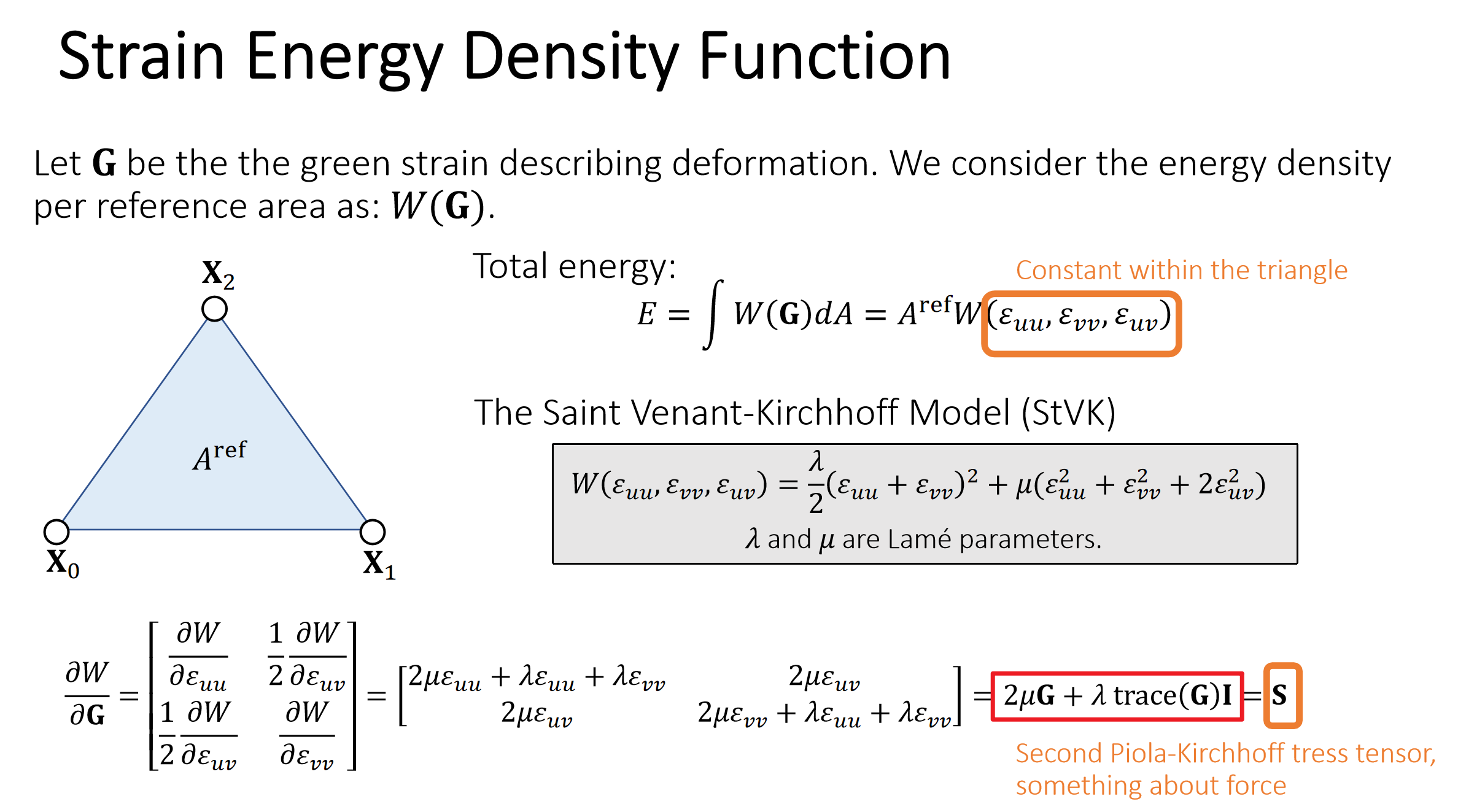 其中G是格林应变
其中G是格林应变
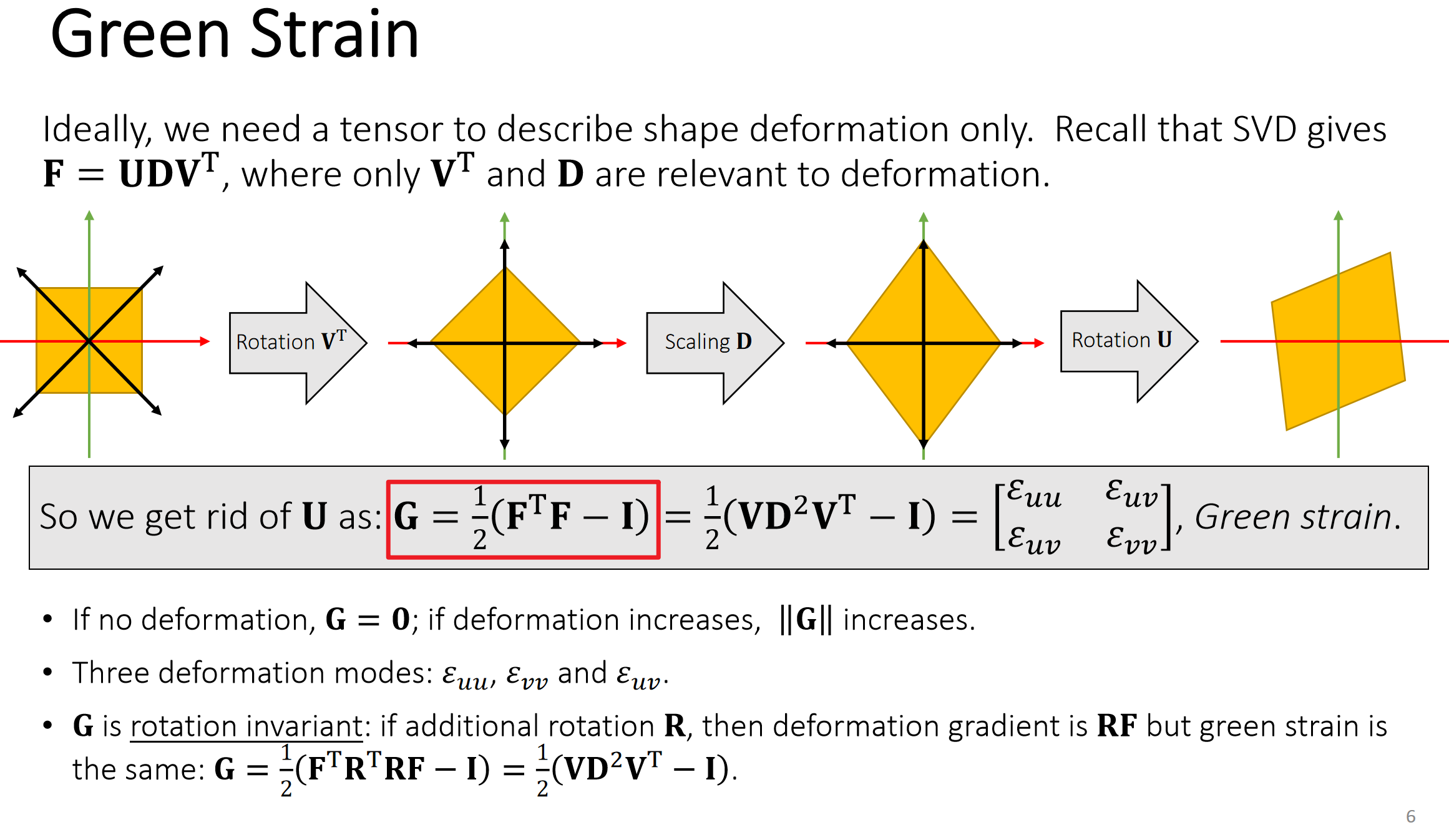
- G如何计算?
G=21(FTF−I) (除了格林应变,我们还有柯西应变可以用。但柯西应变不满足旋转不变性,因此需要用SVD提取出来旋转)
格林应变的好处是其自动满足旋转不变性。