quternion
对应讲解视频
是什么:复数在三维的推广
四元数就是四个数。它是复数的推广。
复数为
四元数则多了两个虚部
其中i,j,k都是虚数。所以
干什么的:三维点的旋转
复数表示二维旋转
复数可以表示二维点的旋转。
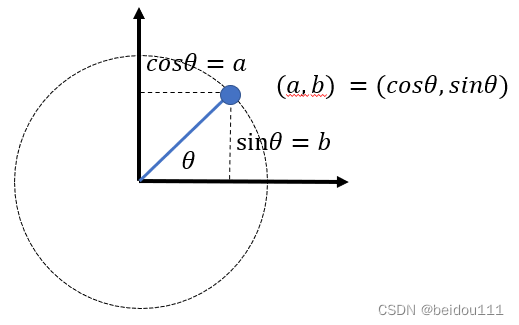
其中的圆是单位圆。
如图,就表示点或向量绕着原点旋转了角度。
我们可以把图中的二维坐标(a,b)写成一个复数
四元数表示三维旋转
同理,四元数可以表示三维单位球面上的一个点(或者说是一个单位方向向量)的旋转
这就表示绕着一个轴(a,b,c)(它是个单位向量)旋转角度。
为什么要用它:解决旋转矩阵的误差累积和欧拉角的万向节锁问题
在四元数之外,有另外两种表示三维旋转的方案:
- 欧拉角:简单易懂,但有万向节锁问题。
- 旋转矩阵:可以累乘,但有误差累计问题。
正是因为这两种表示方式的缺陷,才造成了四元数表示法的流行。
欧拉角的问题
欧拉角:即绕x轴,绕y轴,绕z轴旋转的角度。这三个角度叠加在一起,就能表示任意方向的旋转。
优点是简单直观,所以在三维软件的用户界面上通常都用欧拉角表示。但是软件内部的计算过程都用四元数。 缺点是万向节锁问题。
万向节锁问题:就是两个转轴重合的时候,就会丧失其中一个旋转自由度。
旋转矩阵的问题
旋转矩阵用9个分量来表示旋转。当然它是对称的,因此实际上要存储6个分量。既然欧拉角只用了三个量,旋转矩阵的信息表示一定是冗余的。
冗余的信息干什么去了呢?冗余的信息用来表示剪切变形了。
也就是说,旋转矩阵并不只是用于刚体旋转的,剪切变形也掺混在旋转矩阵内部了。这就导致一个很严重的问题:当误差累积之后,旋转矩阵造成的误差效果不光是多转或少转了1、2度角度这么简单,而是造成了刚体的剪切变形!
剪切变形之后的刚体还是刚体吗?当然就不是了。这就是很严重的问题。
这也是为什么明明所有方法都会造成累积误差,但是我们特别在意旋转矩阵的累积误差的原因。因为它造成的后果很严重。
旋转矩阵要纯粹地表示刚体旋转,必须满足它是正交矩阵这个条件。如果不满足,那么它里面就掺杂了剪切变形!
因此我们每次旋转之后,需要将旋转矩阵正交化。其中一个正交化的方法,就是施密特正交化。你也许想象到了,施密特正交化是多么繁琐复杂的一个过程。
怎么做:用四元数旋转点
用旋转矩阵旋转点x,只要不断左乘矩阵就好了。
而用四元数旋转点,则是要做个三明治:
这有点像矩阵相似,但是请注意相似矩阵的逆是写在左边的,而且,相似矩阵针对的是矩阵,这里的q是四元数。四元数的逆显然和矩阵的逆不是一个概念。四元数是复数的推广,不是矩阵!不能套用矩阵的运算法则。
幸好,四元数的逆非常简单,假设q为单位四元数(如果不是就先归一化):
这就是实部不变,虚部加个负号而已!而且你可以试验一下,它是否符合逆的概念,也就是
实际上,就是复数的共轭的推广。
PS: 如果q没有归一化,那么q的逆只需要再除以模的平方: $$ q^{-1} = \frac{w - ( ai+bj+ck)}{||q||^2} $$
旋转叠加
四元数也像旋转矩阵那样能够累乘! 比如先旋转q1,再旋转q2
其中四元数的乘法非常简单,参考复数的计算方法就好了。

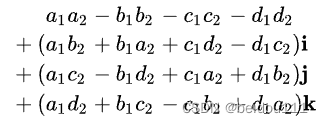
也可以参考下面的公式

四元数转换为三维点
旋转之后,怎么得到三维的点坐标呢?
我们只需要把实部抛弃(或者写成0),虚部的三个值恰好就是一个三维点的坐标。
也就是说
恰好就是三维点
代码(C++ Eigen)
#include <Eigen/Dense>
#include <iostream>
#include <cmath>
using namespace Eigen;
using namespace std;
#define _MATH_DEFINES_DEFINED
//四元数相加
Quaternionf qadd(Quaternionf q1, Quaternionf q2)
{
Quaternionf res;
res.vec() = q1.vec() + q2.vec();
res.w() = q1.w() + q2.w();
return res;
}
//四元数数乘(即缩放)
Quaternionf qscale(Quaternionf q, float scale)
{
Quaternionf res;
res.vec() = scale * q.vec() ;
res.w() = scale * q.w() ;
return res;
}
//用向量公式的乘法
Quaternionf qmul(Quaternionf q1, Quaternionf q2)
{
Quaternionf res;
res.vec() = q1.w() * q2.vec() + q2.w() * q1.vec() + q1.vec().cross(q2.vec());
res.w() = q1.w() * q2.w() - q1.vec().dot(q2.vec());
return res;
}
//用向量公式的乘法 (结果是一样的)
Quaternionf qmul2(Quaternionf q1, Quaternionf q2)
{
Quaternionf res;
res.w() = q1.w() * q2.w() - q1.x() * q2.x() - q1.y() * q2.y() - q1.z() * q2.z();
res.x() = q1.w() * q2.x() + q1.x() * q2.w() + q1.y() * q2.z() - q1.z() * q2.y();
res.y() = q1.w() * q2.y() - q1.x() * q2.z() + q1.y() * q2.w() + q1.z() * q2.x();
res.z() = q1.w() * q2.z() + q1.x() * q2.y() - q1.y() * q2.x() + q1.z() * q2.w();
return res;
}
//求逆
Quaternionf qinv(Quaternionf q)
{
Quaternionf res;
res.vec() = - q.vec() ;
res.w() = q.w();
float n=q.norm();
res.vec() /= n*n;
res.w() /= n*n;
return res;
}
int main()
{
Quaternionf q1{1,2,3,4}, q2{5,6,7,8}, res;
// cout<<q1 <<endl;
// cout<<q2 <<endl;
// res = qadd(q1, q2); //加法
// cout<< res <<endl;
// res = qscale(q1, 5.0); //数乘
// cout<< res <<endl;
// cout<< q1*q2<<endl; //Eigen自带乘法
// res = qmul(q1,q2); //乘法1
// cout<< res <<endl;
// res = qmul2(q1,q2); //乘法2
// cout<< res <<endl;
// q1 = q1.normalized();
// q2 = q2.normalized();
// cout<< q1.inverse()<<endl;
// res = qinv(q1); //求逆
// cout<< res <<endl;
//用四元数旋转
Vector3f point{1.0, 1.0, 0};
point = point.normalized();
Quaternionf p;
p.vec() = point;
p.w() = 0;
float theta = 45.0 / 180 * 3.14159265358979323846;
Vector3f axis{0,0,1};
Quaternionf q{cos(theta/2), sin(theta/2) * axis[0], sin(theta/2) * axis[1], sin(theta/2) * axis[2]};
cout<<q<<endl;
Quaternionf p_new = q * p * q.inverse();
cout<<p_new<<endl;
Vector3f point_new=p_new.vec();
cout<<point_new<<endl;
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.10)
project(tryEigen)
find_package(Eigen3 REQUIRED)
add_executable(out tryEigen.cpp)
代码(numpy-quaternion)
有个python包(就叫numpy-quaternion)定义了常用的quaternion,代码库如下 https://github.com/moble/quaternion
文档如下 https://quaternion.readthedocs.io/en/latest/
安装
python -m pip install --upgrade --force-reinstall numpy-quaternion
导入
import numpy as np
import quaternion
定义四元数
q1 = np.quaternion(1,2,3,4) #定义一个四元数(w,x,y,z)
q2 = np.quaternion(5,6,7,8)
print(q1,q2.w, q2.x, q2.y, q2.z)
b = quaternion.as_float_array(q1) #转换为numpy数组
print(b)
输出
quaternion(1, 2, 3, 4) 5.0 6.0 7.0 8.0
array([1., 2., 3., 4.])
通过角度和转轴定义四元数
theta = np.deg2rad(90) #转角:90度
axis = np.array([0,0,1])#转轴:z轴
q = np.quaternion(np.cos(theta/2), np.sin(theta/2) * axis[0], np.sin(theta/2) * axis[1], np.sin(theta/2) * axis[2]) #定义四元数:沿着转轴axis转theta角度
print(q)
theta1 = quaternion.as_euler_angles(q) #转换为欧拉角(常常不是预期结果, 慎用)
theta1 = np.rad2deg(theta1)
print(theta1)
输出
quaternion(0.707106781186548, 0, 0, 0.707106781186548)
[45. 0. 45.] #欧拉角的结果是不对的
转换为旋转矩阵后旋转一个点
point = np.array([1,0,0]) #定义一个点(1,0,0)
m = quaternion.as_rotation_matrix(q) #四元数转换为旋转矩阵
## print(m)
v = m @ point #用旋转矩阵旋转一个点
print(v)
输出
[-2.22044605e-16 1.00000000e+00 0.00000000e+00]
直接用四元数旋转一个点
point = quaternion.from_vector_part(point) #将一个点转换为四元数,实部为0
print(point)
p_new = q * point * q.conjugate() #旋转点,结果为四元数
print(p_new)
p_new = quaternion.as_vector_part(p_new) #结果四元数转换为点,直接去掉实部即可
print(p_new)
输出
quaternion(0, 1, 0, 0)
quaternion(0, 0, 1, 0)
[0. 1. 0.]